

គោលការណ៍នៃវីស stepper motor៖ វីស និងគ្រាប់ត្រូវបានប្រើដើម្បីភ្ជាប់ ហើយគ្រាប់ថេរត្រូវបានយកដើម្បីការពារវីស និងគ្រាប់ពីការបង្វិលទាក់ទងគ្នាទៅវិញទៅមក ដូច្នេះអនុញ្ញាតឱ្យវីសផ្លាស់ទីតាមអ័ក្ស។ ជាទូទៅ មានវិធីពីរយ៉ាងដើម្បីដឹងពីការផ្លាស់ប្តូរនេះ។
ទីមួយគឺការកសាង rotor ជាមួយនឹងខ្សែស្រឡាយខាងក្នុងចូលទៅក្នុងម៉ូទ័រហើយដឹងចលនាលីនេអ៊ែរដោយភ្ជាប់ខ្សែស្រឡាយខាងក្នុងរបស់ rotor និងវីសដែលត្រូវបានគេហៅថា penetrating screw stepping motor ។ (គ្រាប់ត្រូវបានរួមបញ្ចូលជាមួយ rotor ម៉ូទ័រ ហើយវីសកាត់តាមកណ្តាលនៃ rotor ម៉ូទ័រ។ នៅពេលប្រើប្រាស់ សូមជួសជុលវីស ហើយធ្វើការប្រឆាំងការបង្វិល នៅពេលដែលម៉ូទ័រត្រូវបានបើក ហើយ rotor បង្វិល ម៉ូទ័រនឹងផ្លាស់ទីតាមបន្ទាត់ត្រង់តាមវីស។ (ផ្ទុយទៅវិញ ប្រសិនបើម៉ូទ័រត្រូវបានជួសជុលខណៈពេលដែលវីសត្រូវបានបង្កើត នោះវីសនឹងធ្វើចលនា)។
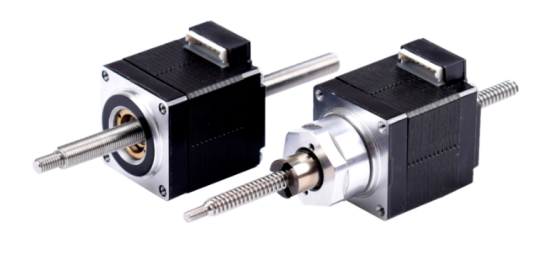
ប្រភេទតាមអ័ក្ស
ទីពីរគឺយកវីសដូចជាម៉ូទ័រចេញ shaft នៅក្នុងម៉ូទ័រខាងក្រៅតាមរយៈ nut drive ខាងក្រៅ និងការភ្ជាប់វីស ដូច្នេះដើម្បីដឹងពីចលនាលីនេអ៊ែរ នេះគឺជាប្រភេទ screw stepping motor ខាងក្រៅ។ លទ្ធផលគឺជាការរចនាដ៏សាមញ្ញបំផុតដែលអាចឱ្យចលនាលីនេអ៊ែរមានភាពជាក់លាក់នៅក្នុងកម្មវិធីជាច្រើនត្រូវបានអនុវត្តដោយផ្ទាល់ជាមួយម៉ូទ័រ stepper វីសដោយមិនចាំបាច់ដំឡើងតំណភ្ជាប់មេកានិកខាងក្រៅ។ (គ្រាប់គឺនៅខាងក្រៅម៉ូទ័រ ហើយត្រូវបានភ្ជាប់ជាមួយយន្តការដ្រាយ។ នៅពេលដែលម៉ូទ័របង្វិល គ្រាប់នឹងផ្លាស់ទីតាមបន្ទាត់ត្រង់តាមវីស។ )
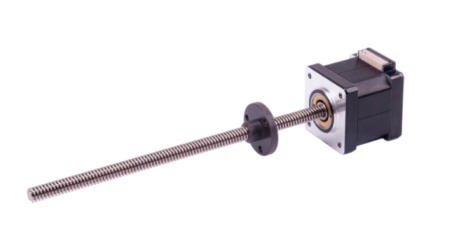
ប្រភេទដ្រាយខាងក្រៅ
អត្ថប្រយោជន៍នៃកម្មវិធីនៃម៉ូទ័រជំហានលីនេអ៊ែរតាមអ័ក្ស:
ការប្រៀបធៀបសេណារីយ៉ូនៃកម្មវិធីដែលម៉ូទ័រ stepper លីនេអ៊ែរដែលជំរុញពីខាងក្រៅត្រូវបានប្រើក្នុងការភ្ជាប់ជាមួយមគ្គុទ្ទេសក៍លីនេអ៊ែរម៉ូទ័រ stepper លីនេអ៊ែរឆ្លងកាត់អ័ក្សមានគុណសម្បត្តិផ្ទាល់ខ្លួនរបស់ពួកគេដែលត្រូវបានឆ្លុះបញ្ចាំងជាចម្បងនៅក្នុងទិដ្ឋភាព 3 ខាងក្រោម:
1.អនុញ្ញាតឱ្យមានកំហុសក្នុងការដំឡើងប្រព័ន្ធកាន់តែច្រើន៖
ជាទូទៅ ប្រសិនបើម៉ូទ័រ stepper លីនេអ៊ែរដែលជំរុញពីខាងក្រៅត្រូវបានប្រើ ភាពស្របគ្នាមិនល្អរវាងវីស និងការម៉ោនផ្លូវទំនងជានាំឱ្យប្រព័ន្ធជាប់គាំង។ ទោះជាយ៉ាងណាក៏ដោយជាមួយនឹងម៉ូទ័រ stepper លីនេអ៊ែរឆ្លងកាត់អ័ក្ស បញ្ហាធ្ងន់ធ្ងរនេះអាចត្រូវបានបន្ធូរបន្ថយយ៉ាងខ្លាំងដោយសារតែលក្ខណៈរចនាសម្ព័ន្ធនៃការរចនាដែលអនុញ្ញាតឱ្យមានកំហុសប្រព័ន្ធកាន់តែច្រើន។
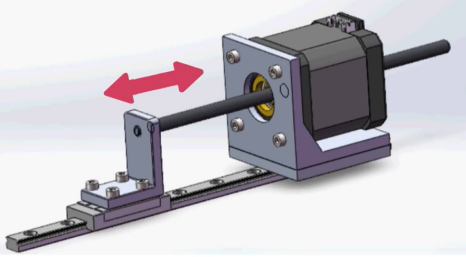
នៅពេលដែលម៉ូទ័រត្រូវបានថាមពល យចនបង្វិលជាមួយ rotor ហើយវីសត្រូវបានភ្ជាប់ទៅនឹងបន្ទុកខាងក្រៅ ហើយផ្លាស់ទីក្នុងបន្ទាត់ត្រង់តាមការណែនាំ។
2.មិនកំណត់ដោយល្បឿនសំខាន់នៃវីសៈ
នៅពេលដែលម៉ូទ័រ stepper លីនេអ៊ែរដែលជំរុញពីខាងក្រៅត្រូវបានជ្រើសរើសសម្រាប់ចលនាលីនេអ៊ែរដែលមានល្បឿនលឿន ពួកវាជាធម្មតាត្រូវបានកំណត់ដោយល្បឿនសំខាន់នៃវីស។ ទោះយ៉ាងណាក៏ដោយជាមួយនឹងម៉ូទ័រ stepper លីនេអ៊ែរឆ្លងកាត់អ័ក្សវីសត្រូវបានជួសជុលនិងប្រឆាំងនឹងការបង្វិលដែលអនុញ្ញាតឱ្យម៉ូទ័រជំរុញគ្រាប់រំកិលនៃផ្លូវណែនាំលីនេអ៊ែរ។ ដោយសារវីសនៅស្ថានី វាមិនត្រូវបានកំណត់ដោយល្បឿនសំខាន់នៃវីសនៅពេលដឹងអំពីល្បឿនខ្ពស់។
3.វាជួយសន្សំសំចៃទំហំដំឡើង៖
ម៉ូទ័រជំហានលីនេអ៊ែរតាមអ័ក្សមិនយកកន្លែងបន្ថែមលើសពីប្រវែងវីសទេ ដោយសារការរចនារចនាសម្ព័ន្ធដែលគ្រាប់ត្រូវបានបង្កើតឡើងនៅក្នុងម៉ូទ័រ។ ម៉ូទ័រជាច្រើនអាចត្រូវបានម៉ោននៅលើវីសតែមួយ។ ម៉ូទ័រមិនអាច "ឆ្លងកាត់" គ្នាទៅវិញទៅមកបានទេប៉ុន្តែចលនារបស់ពួកគេគឺឯករាជ្យពីគ្នាទៅវិញទៅមក។ ដូច្នេះហើយ វាគឺជាជម្រើសដ៏សមរម្យមួយសម្រាប់កម្មវិធីដែលមានតម្រូវការទំហំកាន់តែតឹងរ៉ឹង។
សម្រាប់ព័ត៌មានបន្ថែម សូមទាក់ទងមកយើងខ្ញុំតាមរយៈamanda@kgg-robot.comឬ+ វ៉ា0086 15221578410.
ពេលវេលាផ្សាយ៖ ថ្ងៃទី ១១ ខែកុម្ភៈ ឆ្នាំ ២០២៥




