

ផលិតផល



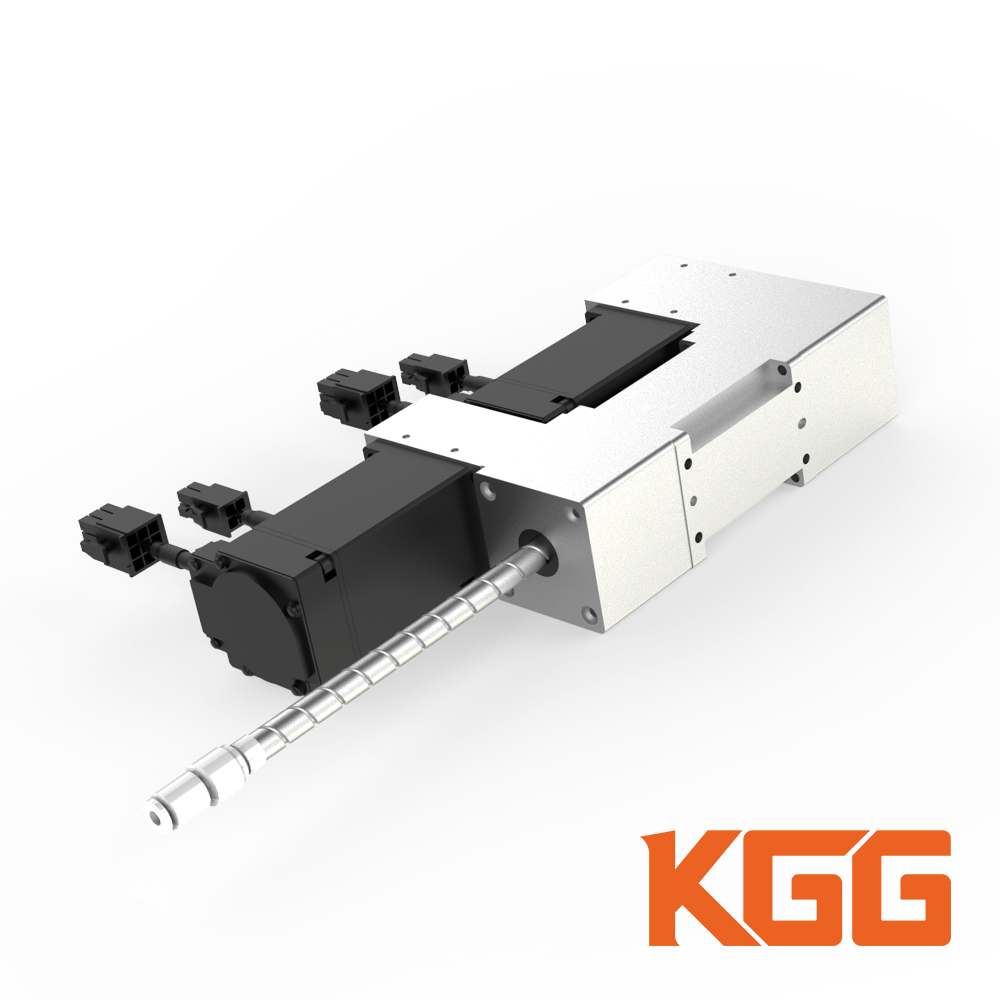


ZR Axis Actuator
ម៉ូទ័រអ័ក្ស ZR ប្រើម៉ូទ័រប្រហោងដើម្បីជំរុញអ័ក្ស Z ដើម្បីបង្វិលគ្រាប់វីសគ្រាប់បាល់ ដើម្បីសម្រេចបាននូវចលនាលីនេអ៊ែរឡើងលើ និងចុះក្រោម ត្រង់ចំនុចដែលគ្រាប់ផ្លេនផ្លេនរបស់បាល់ដើរតួជារចនាសម្ព័ន្ធបញ្ឈប់ និងដឹកនាំសម្រាប់អ័ក្សវីស។ គ្រាប់វីសគ្រាប់បាល់ និងគ្រាប់ផ្លេនផ្លេន បង្វិលក្នុងល្បឿនដូចគ្នា និងក្នុងទិសដៅដូចគ្នា ដើម្បីសម្រេចបាននូវការបង្វិលនៅក្នុងទីតាំងនៃអ័ក្សដ្រាយ ដោយគ្មានចលនាលីនេអ៊ែរឡើងលើ និងចុះក្រោម។ ZR shaft actuator អាចត្រូវបានប្រើជាមួយនឹងអ័ក្សច្រើនដើម្បីសន្សំពេលសម្រាប់ការគ្រប់គ្រងសមាសភាគយ៉ាងឆាប់រហ័ស។
អត្ថប្រយោជន៍ផលិតផល៖
01. ការបោសសំអាតអ័ក្ស 0
02. សំលេងរំខានទាបនិងចលនារលូន
03. សំណង់បង្រួបបង្រួម និងទម្ងន់ស្រាល
04. ការសាងសង់ឧបករណ៍បំប្លែងរង្វិលជុំបិទជិត
05. ការគ្រប់គ្រងសម្ពាធអាចធ្វើទៅបាន

វីសគ្រាប់បាល់ជាមួយបាល់ Spline
ម៉ាកផលិតផលថ្មីដែលអនុវត្ត KGG ខ្នាតតូចbទាំងអស់។sនាវិកជាមួយbទាំងអស់។spline(G-BSS) និងបានដឹងពីមុខងារបី គឺចលនាលីនេអ៊ែរ(Z) ចលនាបង្វិល(θ) និងម៉ាស៊ីនបូមធូលី(V) ជាមួយនឹងផលិតផលមួយ។
ទម្រង់ស្ដើងត្រូវបានដឹងដោយការបើកបរ កbទាំងអស់។sនាវិក និង កbទាំងអស់។sខ្សែបន្ទាត់nut សាងសង់ដោយផ្ទាល់នៅក្នុង ahអូលmអូតូ។

លីនេអ៊ែរMគំនិត(z)
លីនត្រចៀកmotiបើកដោយការបើកបរ កz- អ័ក្សmotor និងបង្វិលbទាំងអស់។sនាវិកnយូ នៅពេលនេះ សbទាំងអស់។sខ្សែបន្ទាត់but ដើរតួជាឧបករណ៍ប្រឆាំងការបង្វិល និងមគ្គុទ្ទេសក៍ស្លាយនៃ asនាវិកsហាហ្វ។
ការបង្វិល((θ)
បង្វែរbទាំងអស់។sនាវិកnut និងbទាំងអស់។sខ្សែបន្ទាត់nut ក្នុងពេលតែមួយ ល្បឿនដូចគ្នា និងទិសដៅshaft បង្វិលដោយមិនផ្លាស់ទីឡើងលើចុះក្រោម។
ម៉ាស៊ីនបូមធូលី (V)
ធុញhollow អាចប្រើបានច្រើនដង។ ឧទាហរណ៍ មុខងារបូមធូលី និងផ្លុំ។
តួខ្លួន Super Slim មានសារៈប្រយោជន៍សម្រាប់ការសន្សំទំហំ ដោយសារតែការរួមបញ្ចូលគ្នារវាង Hollow Motor + G-BSS (Miniature Ball Screw with Ball Spline)។
មិនមានម្សៅពាក់ពី Belt & Pulley ដោយសារតែរចនាសម្ព័ន្ធ Direct Drive ។
ចំនួនអប្បបរមានៃសមាសធាតុនាំទៅរកការរចនាសាមញ្ញ និងសន្សំទំហំ។
ក្នុងករណីម៉ូទ័រទំហំ 42 មិនត្រឹមតែចលនាលីនេអ៊ែរ (Z) និងរ៉ូតារី (Θ; ថេតា) ប៉ុណ្ណោះទេ ថែមទាំងមានមុខងារបូមធូលី (V) ផងដែរ។

---ការចែកចាយរាវតាមប្រហោង
---ការគ្រប់គ្រងសមាសភាគ LED រួមបញ្ចូលគ្នាពហុអ័ក្ស
---ការលៃតម្រូវមុំ wafer IC
---ការដំឡើងកញ្ចក់ទូរស័ព្ទចល័ត
---ការដាក់ស្លាកសញ្ញាទូរស័ព្ទ
---DEMODអ្នកបង្ហាញ
សម្រាប់ឧទាហរណ៍បន្ថែមសូមចុចលើវីដេអូខាងក្រោម។
អ្នកនឹងឃើញប្រព័ន្ធបញ្ជូនថ្មី
វាមានលក្ខណៈសាមញ្ញដូចជាការបញ្ចូលគ្នានូវប្លុកអាគារ ហើយអាចត្រូវបានរចនាជាមួយនឹងប្រភេទប្លង់ជាច្រើនដូចជា រាងជារង្វង់ ផ្លូវរត់ ការ៉េ ស្មុគស្មាញ off-ramp swing និង hybrid អាស្រ័យលើបរិយាកាសប្រតិបត្តិការ។
ជាមួយនឹងឧបករណ៏អ័ក្ស KGG ZR ដែលកំពុងដំណើរការស្របគ្នា ការដឹកជញ្ជូនលែងមានភាពស្មុគស្មាញទៀតហើយ......
| រូប |  |  | 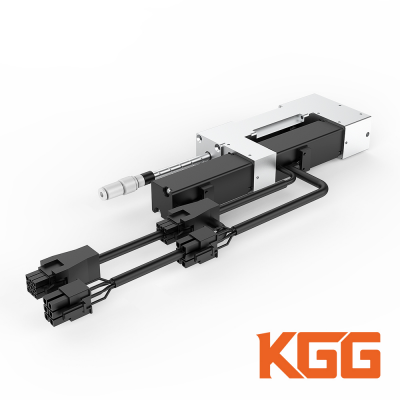 |  |
| គំរូ | ប្រភេទ ZRIN28 | ប្រភេទ ZRIN42 | ប្រភេទ ZRFS30S | ប្រភេទ ZRFS42S |
| ទទឹងមម | 28 ម។ | 42 ម។ | 30 ម។ | 42 ម។ |
| អតិបរមា ការធ្វើដំណើរ mm | 50 ម។ | 50 ម។ | 50 ម។ | 100 ម។ |
| កម្លាំងជំរុញអតិបរមា | 5N | 19 ន | 30 ន | 50 អិន |
| អង្កត់ផ្ចិតវីស mm | 6 ម។ | 8 ម។ | 6 ម។ | 8 ម។ |
| ទាញយក PDF | * | * | * | * |
| 2D/3D CAD | * | * | * | * |
អ្នកនឹងឮពីយើងយ៉ាងឆាប់រហ័ស
សូមផ្ញើសាររបស់អ្នក។ យើងនឹងត្រលប់មកអ្នកវិញក្នុងរយៈពេលមួយថ្ងៃធ្វើការ។
វាលទាំងអស់ដែលត្រូវបានសម្គាល់ដោយ * គឺចាំបាច់។
-

វីសគ្រាប់បាល់ដែលធន់នឹងច្រេះ ភាពជាក់លាក់ខ្ពស់...
-

ខាញ់ប្រេងរំអិលខ្ពស់សម្រាប់បាល់វីស
-

Roller L...
-

HST Built-in Guideway Linear Actuator
-

KGG GLR Linear Motion Precision Ball Screw ជាមួយ...
-

ធន់នឹងច្រេះខ្នាតតូច ធន់ខ្ពស់ និងល្បឿនលឿន...
-

PT Variable Pitch Slide
-

Stepping Motor and Ball / Leading Screw Externa...
-

ស្មុគស្មាញកម្លាំងខ្ពស់ផ្ទុកប្រតិបត្តិការស្ងាត់ Bal...
-

កំពូល




